บทความนี้จะเขียนถึงการสื่อสารระหว่าง Pinguino บอร์ดกับคอมพิวเตอร์ โดยเรามีตัวเลือกว่าจะใช้ USB โมดูลในตัว
PIC18F45K50 emulate เป็น com port สื่อสารกับคอมพิวเตอร์ผ่านทางโปรแกรมเทอร์มินอลต่างๆ หรือจะใช้โมดูล USART ในตัวไมโครคอนโทลเลอร์สื่อสารแทนก็ทำได้
นอกจากนี้หากต้องการ USART มากกว่าหนึ่งโมดูลก็สามารถใช้ Software
USART ที่มีเตรียมไว้ให้กับขา I/O อื่นๆได้อีก
เดี๋ยวเรามาลองดูกันทีละโมดูลกันนะครับ
USB
CDC (Communication Device Class) คือการให้ USB ทำตัวเป็นตัวเชื่อมต่อสื่อสารแบบต่างๆ(https://en.wikipedia.org/wiki/USB_communications_device_class) แต่ที่ส่วนใหญ่เข้าใจกันก็คือ USB จำลองเป็น com
port เมื่อเชื่อมต่อกับคอมพิวเตอร์ โดยใน Pinguino จะมีฟังก์ชันที่ช่วยในการใช้งาน USB CDC อยู่พอสมควร
สิ่งที่เราต้องทำคือแค่เรียกใช้งานเท่านั้น ลองดูตัวอย่างโค้ดดังต่อไปนี้นะครับ
1: void setup() {
2: // put your setup code here, to run once:
3: pinMode(USERLED,OUTPUT);
4: }
5: void loop() {
6: // put your main code here, to run repeatedly:
7: digitalWrite(USERLED, HIGH);
8: CDC.printf("On\n\r");
9: delay(1000);
10: digitalWrite(USERLED,LOW);
11: CDC.printf("Off\n\r");
12: delay(1000);
13: }
ตัวอย่างโค้ดนี้จะเหมือนกับในบทความที่ผ่านมาโดยสั่งให้ USER LED ติด และ ดับ ทุกๆ 1 วินาทีแล้วผมทำการเพิ่มให้มีการส่งข้อความว่า “On” เมื่อ USER LED ติดสว่าง และคำว่า “Off” เมื่อ USER LED ดับ จากบอร์ด Pinguino ไปยังคอมพิวเตอร์ผ่านทางสาย USB ที่เชื่อต่อนะแหละครับ โดยทางฝั่งคอมพิวเตอร์ผมก็ใช้โปรแกรมเทอร์มินอลมาอ่านหรือรับค่าแสดงข้อความ โดยสามารถกำหนด baud rate เท่าไหร่ก็ได้เพราะตัว USB จะจัดการให้เอง สังเกตนะครับว่าผมเพียงแต่เรียกใช้ฟังกชัน CDC.printf() เท่านั้นไม่จำเป็นต้องเซ็ทอัพโมดูล USB ใดๆก่อนเลยค่อนข้างสะดวกมากครับ ลองดูวิดีโอประกอบด้านล่างได้ครับ
USART ( Universal Synchronous Asynchronous Receiver Transmitter ) เป็นโมดูลสื่อสารแบบอนุกรมที่นิยมมากแบบหนึ่งสำหรับไมโครคอนโทรลเลอร์ ใช้ติดต่อสื่อสารกับอุปกรณ์หรือเครื่องมือต่างๆได้มากมาย เช่น Bluetooth, RF, และอื่นๆ รวมถึงใช้สื่อสารกับคอมพิวเตอร์ได้อีกด้วย โดยก่อนเริ่มสื่อสารนั้นจำเป็นต้องกำหนด baud rate หรือความเร็วในการสื่อสารให้ตรงกันทั้งสองฝ่ายเสียก่อน โดยในตัวอย่างต่อไปนี้จะเซ็ทอัพให้ Pinguino สื่อสารกับคอมพิวเตอร์ที่ baud rate เท่ากับ 9600 bits per second ไม่มี hardware flow control ดาต้าบิทเท่ากับ 8 ไม่มี parity และมีเพียง 1 stop bit. โดยสามารถดูได้จากตัวอย่างข้างล่างนี้ครับ
1: void setup() {
2: // put your setup code here, to run once:
3: pinMode(USERLED, OUTPUT);
4: Serial.begin(9600);
5: }
6: void loop() {
7: // put your main code here, to run repeatedly:
8: digitalWrite(USERLED, HIGH);
9: Serial.printf("LED On\n\r");
10: delay(1000);
11: digitalWrite(USERLED, LOW);
12: Serial.printf("LED Off\n\r");
13: delay(1000);
14: }
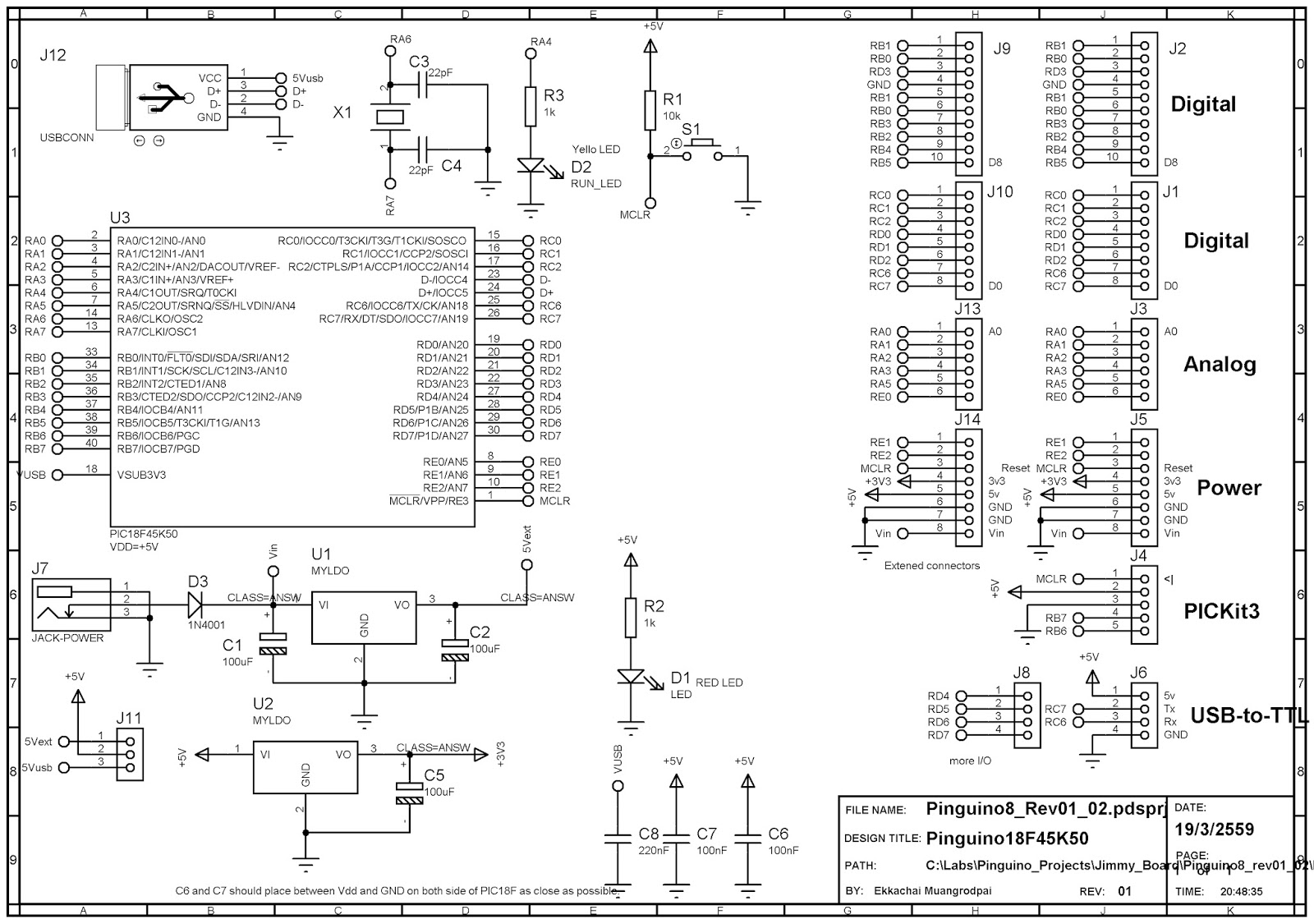
จากโค้ดตัวอย่างจะเห็นว่าเราเพียงจำเป็นต้องเซ็ท baud rate ที่เราต้องการในส่วน setup() ก่อนเริ่มใช้งาน USART โดยเรียกใช้ฟังก์ชัน Serial.begin() หลังจากนั้นเราก็สามารถใช้งานฟังก์ชัน Serial.printf() ในการส่งข้อความขึ้นไปยังคอมพิวเตอร์ผ่านทาง USART ได้แล้ว ตัวอย่างนี้จะเหมือนกับตัวอย่างแรกเกือบทั้งหมดเพียงเปลี่ยนมาใช้ USART แทน CDC เท่านั้น ในการทดสอบเราจำเป็นต้องมี usb-to-serial มาต่อเข้ากับขา Tx และ Rx ของบอร์ด Pinguino ดังแสดงในรูปข้างล่างนี้นะครับ แล้วเราก็ใช้โปรแกรมเทอร์มินอล connect เข้ากับ com port ของ usb-to-serial นั้นๆก็จะสามารถเห็นข้อความ “LED On” และ “LED Off” สลับกันตามจังหวะการติด ดับ ของ USER LED ลองดูวิดีโอดูครับ
 |
| รูป บอร์ด Pinguino เชื่อมต่อกับ USB-to-Serial |
Software Serial เป็นการใช้ขา I/O ของไมโครคอนโทลเลอร์มาทำงานให้เหมือนขา Tx และ Rx ของ USART บางครั้งก็เรียกว่า Bit Bang Serial โดยทั่วไปในไมโครคอนโทลเลอร์ตัวเล็กๆ หรือไมโครคอนโทลเลอร์รุ่นเก่าๆ จะมี USART เพียงแค่ตัวเดียว แต่บางครั้งงานที่เรากำลังทำอยู่นั้นจำเป็นต้องใช้ USART มากกว่าหนึ่ง จะเปลี่ยนไมโครคอนโทลเลอร์เป็นตัวที่ใหญ่ขึ้นก็เปลืองและไม่ง่ายนัก Software Serial จึงเป็นทางออกที่น่าจะเหมาะสมกว่า แต่มันก็มีข้อจำกัดของมันเช่น ใช้กับการสื่อสารที่ baud rate สูงมากไม่ค่อยได้ ต้องคำนวณคาบเวลาของแต่ละบิต ครึ่งบิต ให้แม่นยำและเขียนโปรแกรมให้ถูกต้องด้วย ซึ่งก็ค่อนข้างยากและเสียเวลามากพอสมควร
ใน Pinguino นี้ได้จัดเตรียมไลบรารี่ Software Serial ไว้ให้เราเรียกใช้งานได้อย่างง่ายดาย
เราเพียงแค่ต้องกำหนดว่าจะใช้ PORT ใด และขาไหนให้เป็นขา Tx
และ Rx รวมถึงค่า baud rate ที่ต้องการไว้ที่ส่วนบนของโปรแกรมที่เรากำลังจะเขียนดังตัวอย่างต่อไปนี้
ที่จะใช้ PORTB ขา RB4 เป็น Tx และขา RB5 เป็น Rx โดยกำหนด baud
rate ไว้ที่ 9600 bits per second ดังตัวอย่างข้างล่างนี้
#define SWBAUDRATE 9600// or 57600, 38400, 19200, 9600, 4800
// other baudrates 115200 2400 1200 were tried but did not work perfectly
#define _SW_PORT _PORTB // Transmit pin port and pin
#define TXDpin 4
#define RXDpin 5
#define SW_PORT_TXDpin PORTBbits.RB4
#define SW_TRIS_TXDD TRISBbits.TRISB4
#define SW_PORT_RXDpin PORTBbits.RB5
#define SW_TRIS_RXDD TRISBbits.TRISB5
ถัดมาก็จำเป็นต้องกำหนดให้ขา Tx เป็นเอ้าพุตเพื่อให้สามารถ on/off (bit bang) pin เพื่อให้สามารถส่งดาต้าออกไปจากไมโครคอนโทลเลอร์ได้ และกำหนดค่าเริ่มต้นของทั้งขา Tx และ Rx ให้เป็น high( 1 ) ก่อนดังตัวอย่างข้างล่างนี้ครับ ซึ่งเซ็ทอยู่ใน setup() ฟังก์ชัน
SW_TRIS_TXDD = 0;
SW_PORT_TXDpin = 1;
SW_TRIS_RXDD = 1;
หลังจากนั้นเราก็สามารถเรียกใช้งานฟังก์ชันของ Software Serial ได้อย่างง่ายดายเหมือนฟังก์ชัน Serial ในตัวอย่างที่สองที่ผ่านมาได้ ลองดูตัวอย่างโค้ดทั้งหมดได้ครับ
1: #define SWBAUDRATE 9600// or 57600, 38400, 19200, 9600, 4800
2: // other baudrates 115200 2400 1200 were tried but did not work perfectly
3: #define _SW_PORT _PORTB // Transmit pin port and pin
4: #define TXDpin 4 // or 0, 2, 6
5: #define RXDpin 5 // or 1, 3, 7
6: #define SW_PORT_TXDpin PORTBbits.RB4 // or 0, 2, 6
7: #define SW_TRIS_TXDD TRISBbits.TRISB4 // or 0, 2, 6
8: #define SW_PORT_RXDpin PORTBbits.RB5 // or 1, 3, 7
9: #define SW_TRIS_RXDD TRISBbits.TRISB5 // or 1, 3, 7
10: void setup() {
11: SW_TRIS_TXDD = 0;
12: SW_PORT_TXDpin = 1;
13: SW_TRIS_RXDD = 1;
14: pinMode(USERLED, OUTPUT);
15: }
16: void loop() {
17: digitalWrite(USERLED, HIGH);
18: SwSerial.printf("USER LED On\n\r");
19: delay(1000);
20: digitalWrite(USERLED, LOW);
21: SwSerial.printf("USER LED Off\n\r");
22: delay(1000);
23: }
 |
| USB-to-Serial ต่อเข้ากับขา 4,5 (Pinguino) หรือขา 8,9(Arduino) |